
Latest: Joint Design Log #002 (Knee) is live.
Humanoid Mechanics
Inside Human Proportions
Tendon-driven actuation. Mechanics hidden inside. Phase 0 research project documenting what works and what doesn't.





Full leg prototype assembly

Right ankle prototype — 2-DOF motion test
About Alia
Phase 0 – Public Release (Oct 31, 2025). Lower leg assembly (knee to foot) now available: STL files for ankle, foot, and lower leg components. Electronics board design files. Firmware for joint control and encoders. All documented transparently.
Joint Design Logs: #001 (Ankle) and #002 (Knee) are live with technical breakdowns and validation notes.
Building humanoid mechanics inside real human proportions is hard. Accurate dimensions. Mechanics hidden inside. No compromises on form. This is not a commercial product—it's iterative engineering work documented transparently.
View the full repository on GitHub or follow progress via Public Updates.
Technical Focus
Real Human Proportions
Accurate anatomical dimensions as the primary constraint. Mechanics must fit inside, not the other way around.
Tendon-Driven Actuation
Cables routing torque through the structure, inspired by biological systems. Motors placed strategically, force transmitted via tendons.
Transparent Documentation
What works and what doesn't, all out in the open as we learn. No shortcuts. Just iterative work.
Progressive Open Licensing
We're opening this progressively. Phase 0 right now: validating leg mechanics, testing range of motion, refining control algorithms.
Lower Leg Assembly
Status: Released
Ankle, foot, and lower leg (knee to foot): STL files, electronics board (Rev A), firmware, control software. License: CC BY-NC-ND 4.0 (hardware), MIT (software).
Full CAD Release
Status: Planned
Complete mechanical designs, assembly documentation, bill of materials. Open license for community use and contribution.
Public Governance
Status: TBD
Community-driven decision making, contribution guidelines, sustainable ecosystem development. Details defined as project matures.
Documentation & Updates
Phase 0 lower leg assembly (knee to foot) released Oct 31, 2025. Joint Design Logs #001 (ankle) and #002 (knee) are now live. Current validation includes ankle 2-DOF motion, tendon-driven actuation, and waypoint-based control.
Latest: Joint Design Log #002 (Knee) published on YouTube. Watch video · Announcement thread.
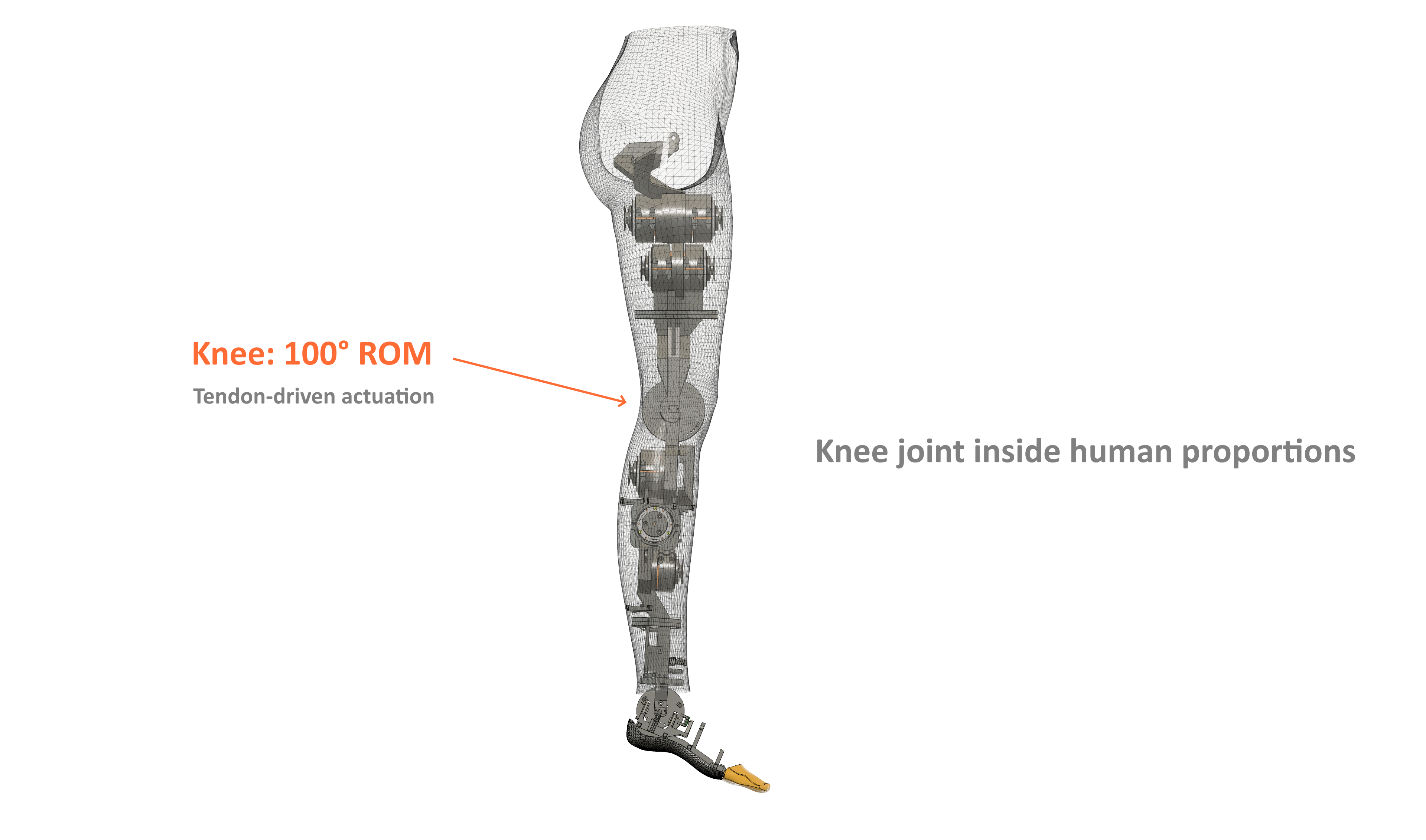
Joint Design Log #002 — Knee joint (published Jan 26, 2026)
- Joint Design Logs: #002 Knee · #001 Ankle
- GitHub Repository: Full project source — Hardware files, firmware, documentation, issues
- Public Updates: Transparent progress tracking
- X (Twitter): @AliaHumanoid — Updates, prototype photos, test videos
- YouTube: @aliahumanoid — Technical breakdowns and motion demos